前段时间去了华南理工看RoboMaster全国大学生机器人大赛南部赛区,地头蛇华工果断是分区赛冠军了,看到传说中的华工猫步果然很炫,我最喜欢的就是步兵机器人了,麦克纳姆轮+射击云台

帅气的步兵机器人😍令人着谜

没能够有机会参加这样的机器人大赛☹️,于是乎就有了下面的草稿版麦克纳姆轮小车~~
小车功能比较简单,手机蓝牙遥控,可以全方位转向
一共有10个转向:前进,后退,横向向左,横向向右,正转(顺时针),反转(逆时针),左斜上,右斜上,左斜下,右斜下
零件清单:
| 名称 | 数量 |
|---|---|
| 麦克纳姆轮 | 4个(两正两反) |
| 小滚轮 | 56个 |
| M3螺母或M3自锁螺母 | 36个 |
| 轴承3x6x2.5mm | 28个 |
| M3x30mm螺栓 | 36个 |
| 7.4v锂电池 | 1个 |
| TT电机 | 4个 |
| HC06蓝牙模块 | 1个 |
| 创新林Xduino控制板 | 1个 |
| TB6612FNG电机驱动 | 1个 |
| A2x8自攻螺丝 | 8个 |
| 15mm热缩管 | 若干 |
| 小车底板 | 1个 |
| TT电机固定夹 | 8个 |
轮子是3D打印的,麦克纳姆轮有点贵所以自己做吧,哈哈!

56个小滚轮,每次7个打了8次,打印了快1天…..防打滑套热缩管套了半天,也可以不套看需要
轴承嵌在麦轮的小孔里,装不进去的话要打磨一下,4个麦轮用了28个轴承,28个M3螺栓,28个M3螺母;TT电机联轴器用两个A2x8自攻螺丝拧进去
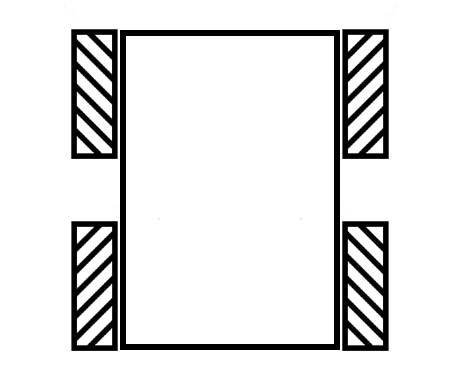
组装好麦轮后,麦轮不是随便安装的,是分正反的,麦轮安装方法有几种,我比较喜欢这种“X”的安装方法(看下面图示),斜杠代表小滚轮的方向
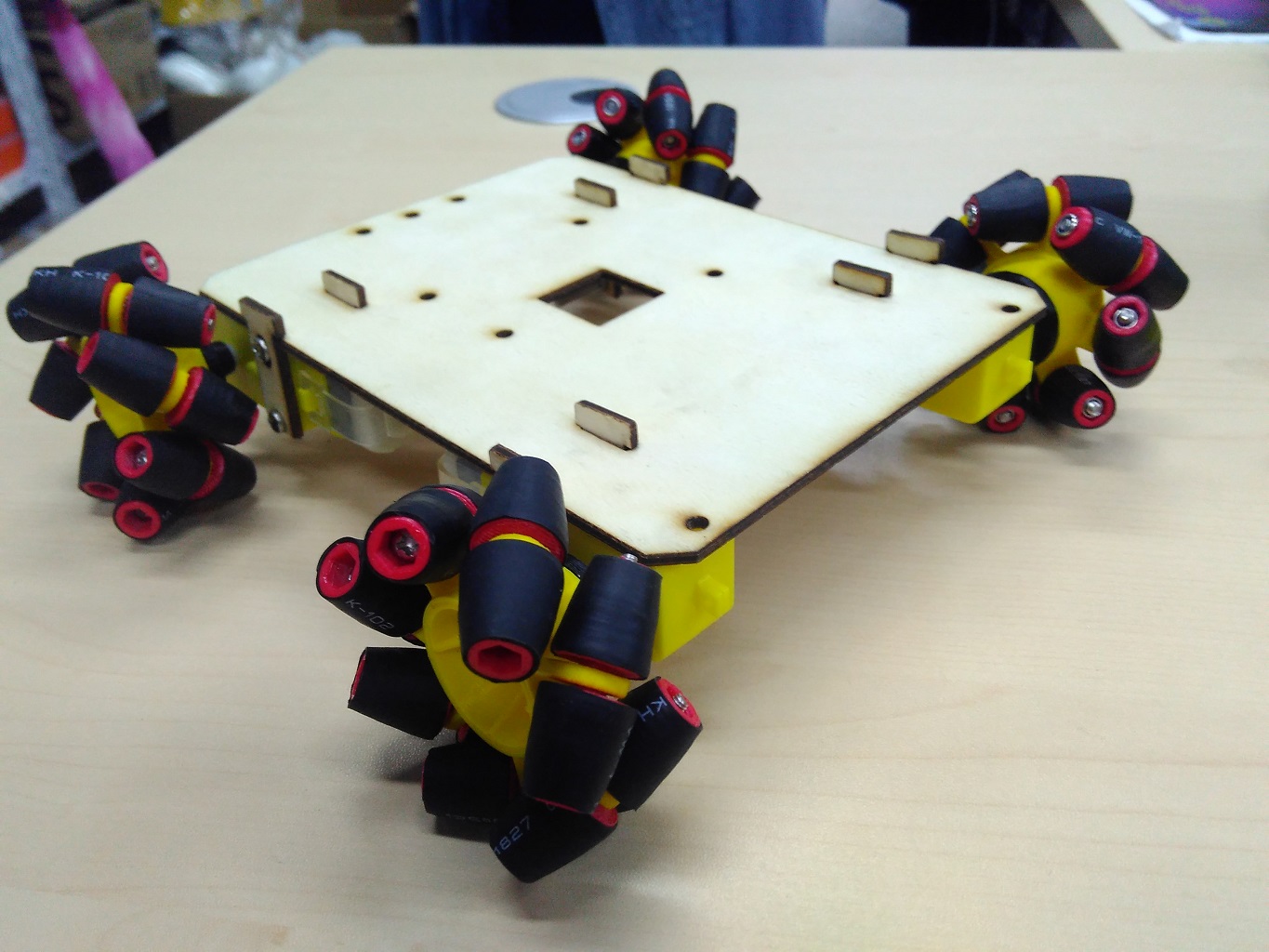
底版是激光切割的木板,每个TT电机用两个TT电机固定件,两个螺栓和螺母固定好,安装好麦轮是这样的↑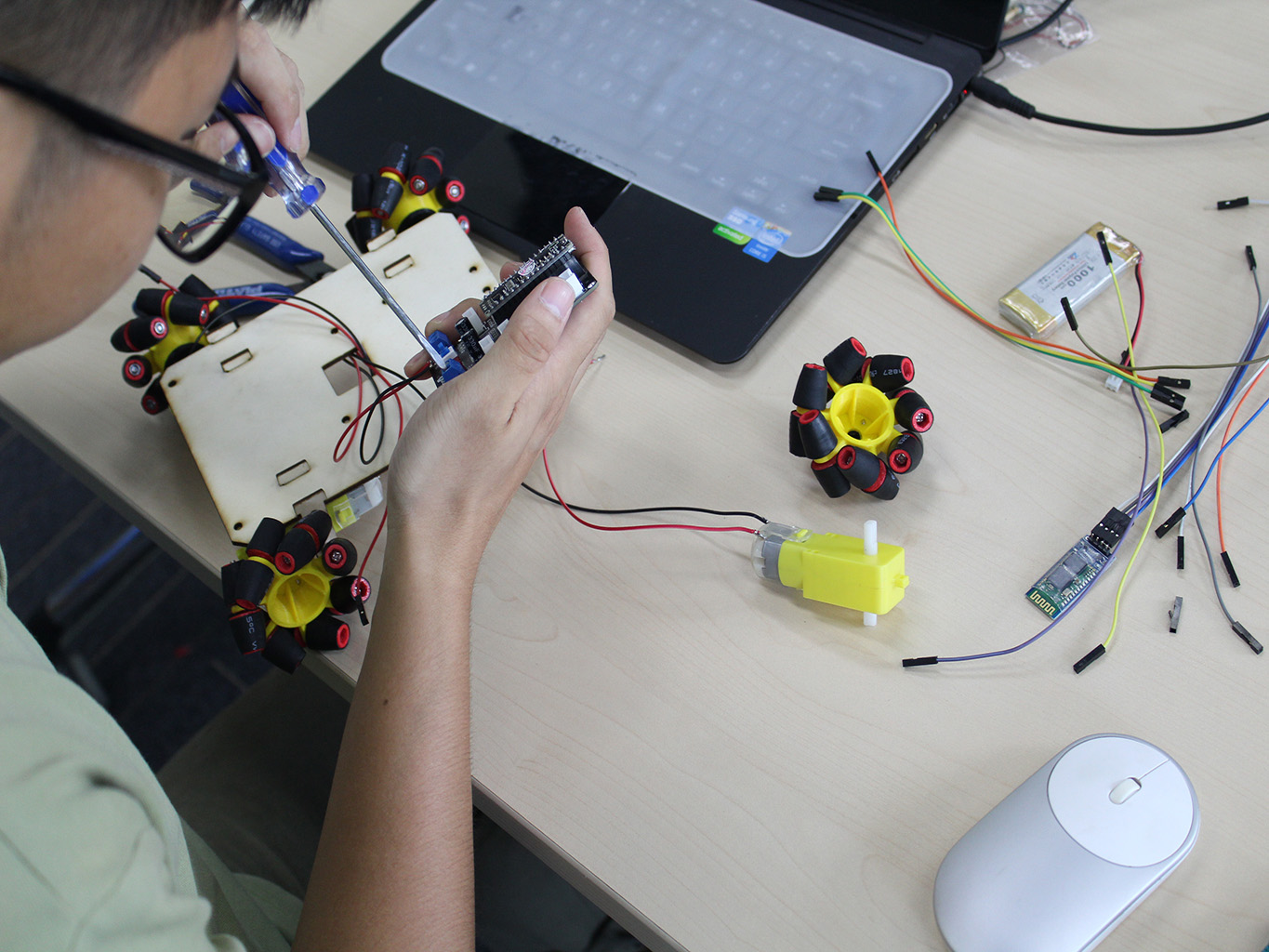
我使用的创新林Xduino板子自带两路电机驱动,7,8与12,13引脚是定义到电机驱动的输出引脚,9,11引脚用于调速,把电机线接到自带的电机接线口刷上下面程序上电就可以转动1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23long T;//设置转速变量
void forword() {
analogWrite(11,T);
digitalWrite(12,HIGH);
digitalWrite(13,LOW);
analogWrite(9,T);
digitalWrite(7,HIGH);
digitalWrite(8,LOW);
}
void setup(){
pinMode(12, OUTPUT);
pinMode(13, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(10, OUTPUT);
digitalWrite(10,HIGH);
T = 0;
}
void loop()
{
T = 200; //设置转速
forword();
}
小车一共是四路电机,所以我们还需要一个TB6612FNG电机驱动板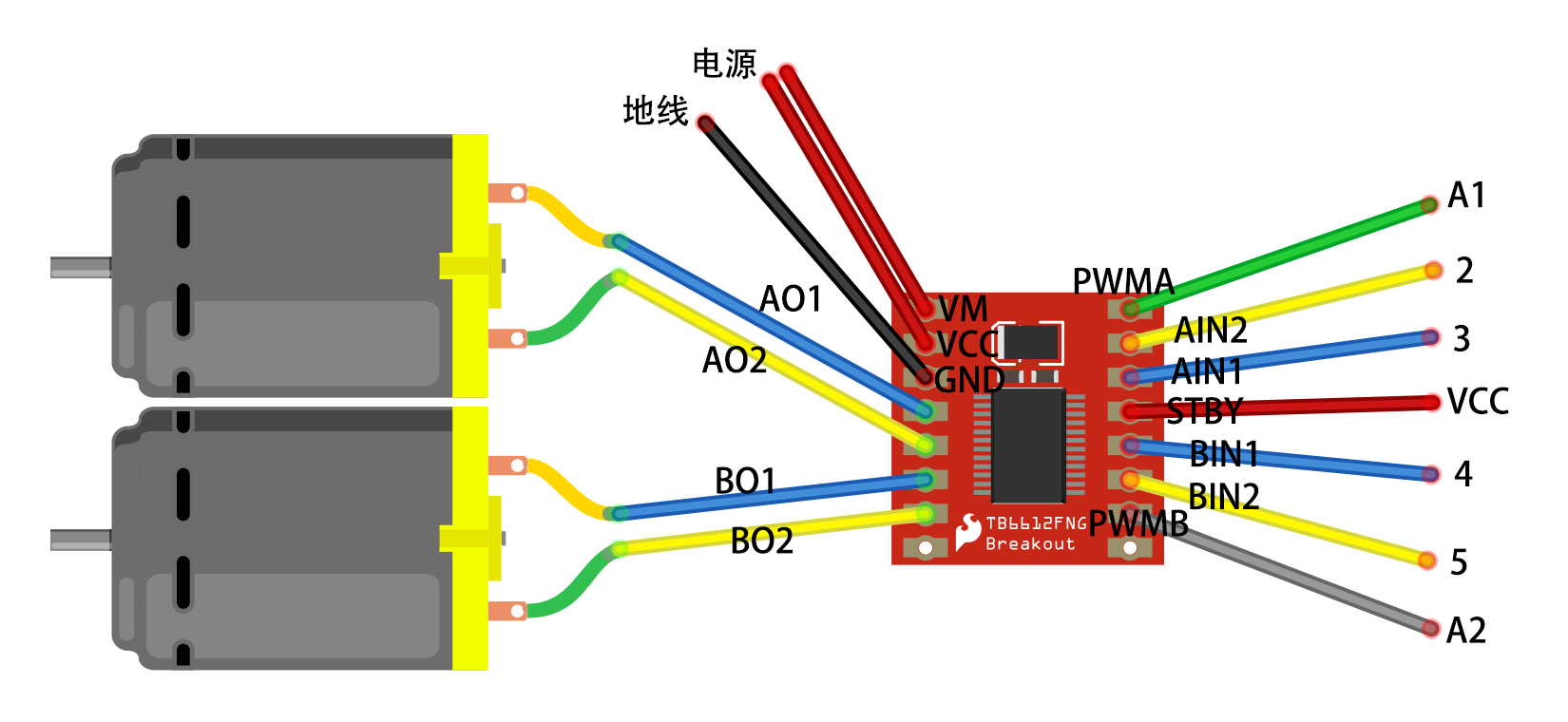
| 引脚说明 | 引脚说明 |
|---|---|
| A控制信号输入——PWMA | VM ——电机驱动电压输入端(4.5V-15V) |
| A电机输入端2 ——AIN2 | VCC ——逻辑电平输入端(2.7V-5.5V) |
| A电机输入端1 ——AIN1 | GND —— 接地 |
| 正常工作/待机状态控制端——STBY | AO1 —— A电机输出端1 |
| B电机输入端1——BIN1 | AO2 —— A电机输出端2 |
| B电机输入端2——BIN2 | BO2 —— B电机输出端2 |
| B控制信号输入端——PWMB | BO1 —— B电机输出端1 |
| 接地——GND | GND —— 接地 |
AO1,AO2,BO1,BO2接到电机线,PWMA,PWMB分别接到板子上的A1,A2引脚,AIN1,AIN2,BIN1,BIN2分别接到板子2,3,4,5引脚,STBY置高接到5v上,最下面的两个GND可以不接
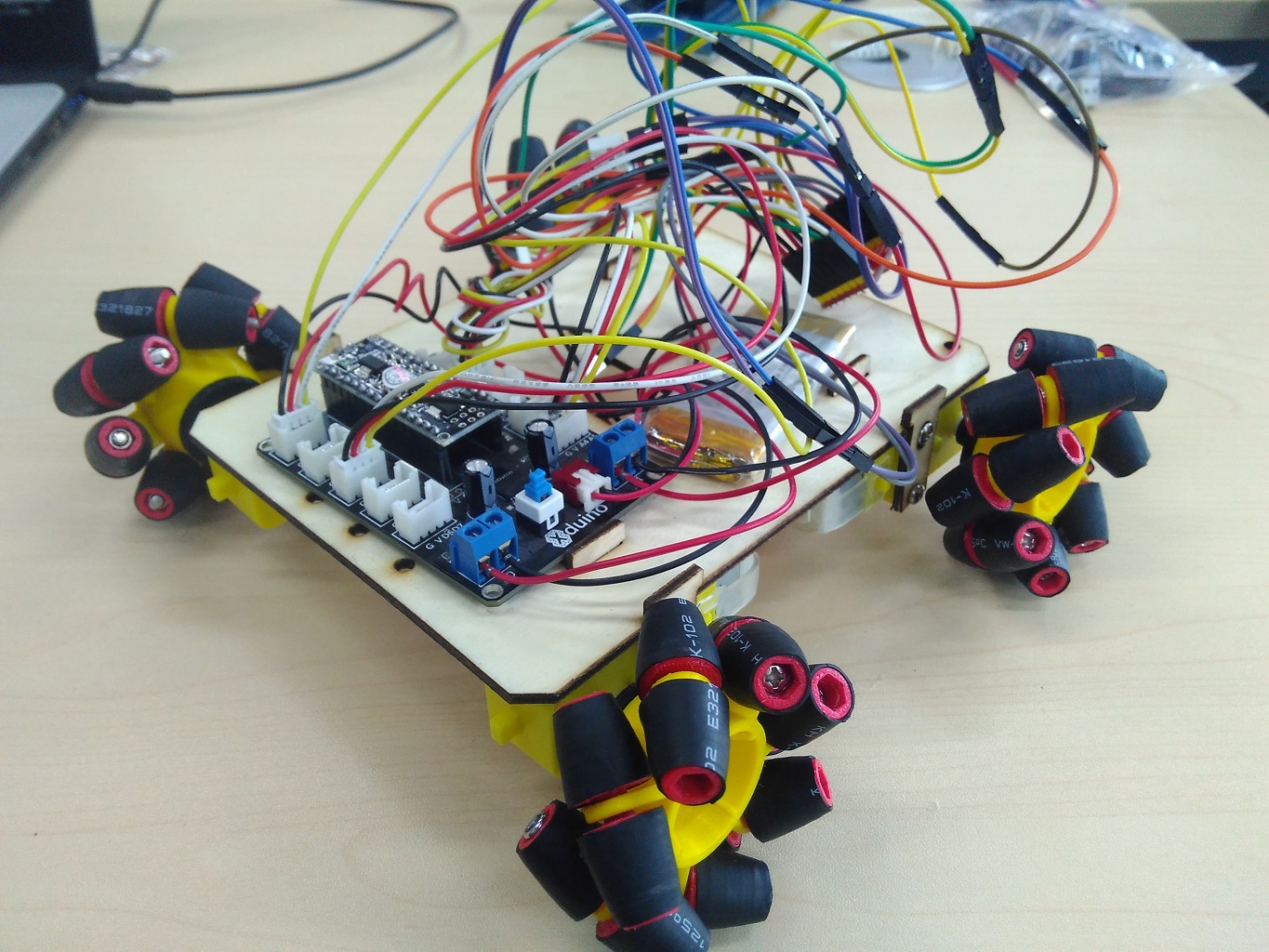
😄接好线就是这样的,接线有点乱,所以叫草稿版,资料也有点乱
接下来是重点了!小车为什么能全向转动呢?是因为轮子特殊的机械结构,通过控制轮子不同的转向组合就可以实现全方位的转向,箭头表示轮子转动方向
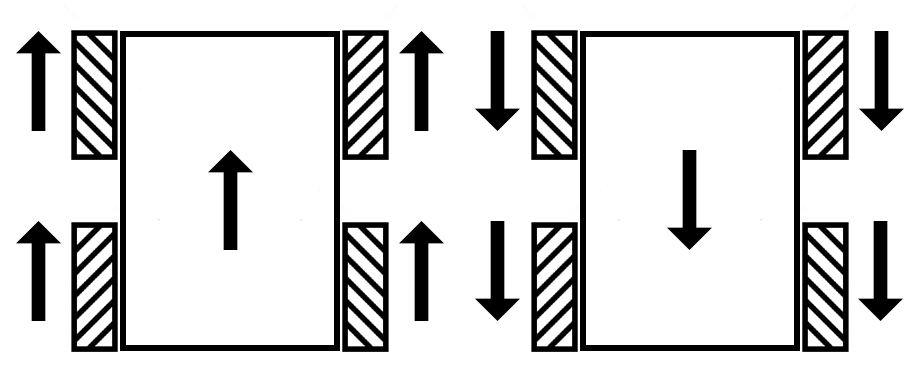
全部轮子同时向前或向后转就可以实现前进和后退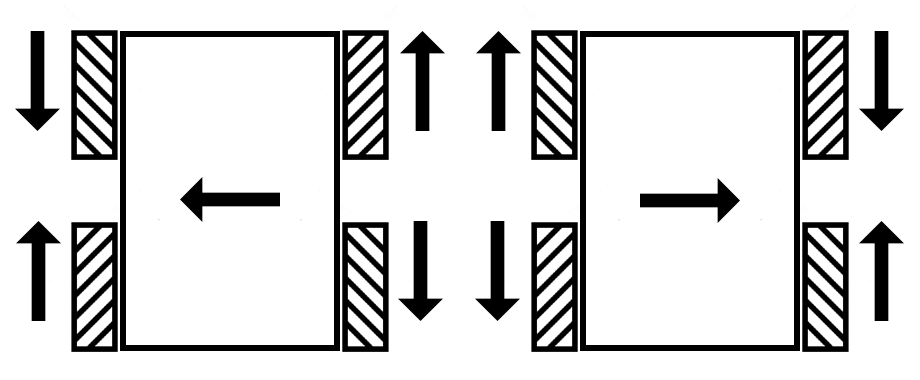
横向向左:左边轮子互相向里转,右边轮子互相向外转;横向向右:右边轮子互相向里转,左边轮子互相向外转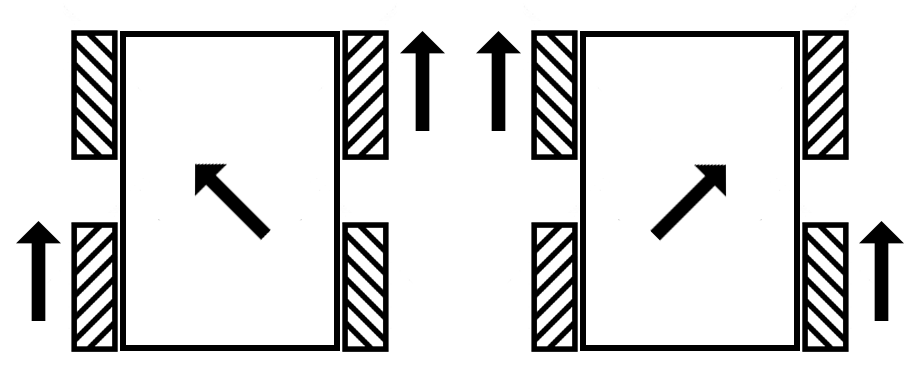
左斜向上:左上和右下轮子不转,右上左下轮子同时向前转;右斜向上:右上和左下轮子不转,左上右下轮子同时向前转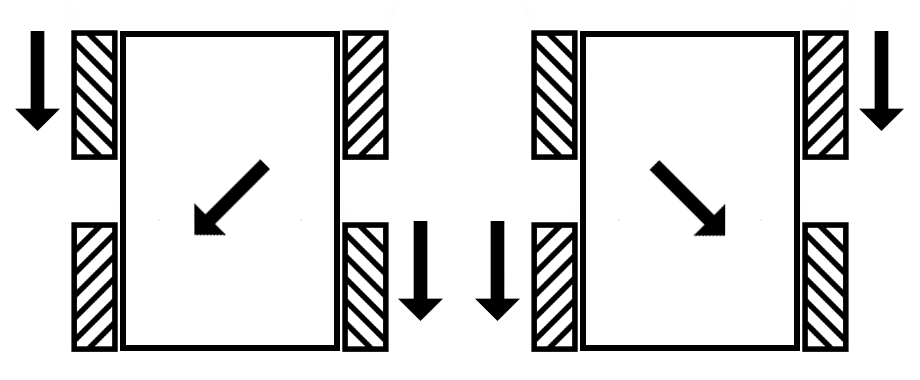
左斜向下:左上和右下轮子不转,右上左下轮子同时向后转;右斜向下:右上和左下轮子不转,左上右下轮子同时向后转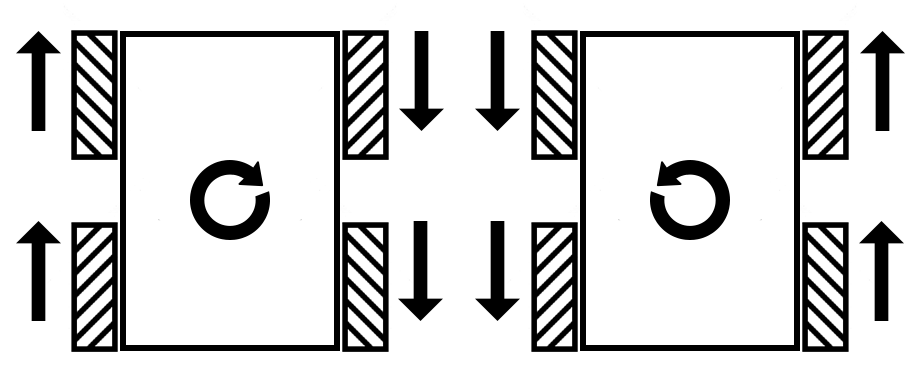
正转:左边轮子同时向前转,右边轮子同时向后转;反转:左边轮子同时向后转,右边轮子同时向前转
现在我们知道转向是如何实现的了,可以下载附件烧录程序调试,蓝牙模块接线仍然vcc,gnd,tx接rx,rx接tx
在网上下载安卓蓝牙SPP软件,连接上蓝牙模块
设置字符
停止:0,前进:1,后退:2.向左:3,向右:4,正转:5,反转:6,左上:7,右上:8,左下:9,右下:a
如果轮子转向不对的话,调代码里面的HIGH,LOW就可以改变轮子转向1
2
3
4
5
6
7
8
9
10
11
12
13
14
15analogWrite(11,200);
digitalWrite(12,LOW);
digitalWrite(13,HIGH);
analogWrite(9,200);
digitalWrite(7,LOW);
digitalWrite(8,LOW);
analogWrite(A1,200);
digitalWrite(2,LOW);
digitalWrite(3,LOW);
analogWrite(A2,200);
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
附件
链接:http://pan.baidu.com/s/1mil3U1E 密码:rn8z